下次埋
《七周七并发模型》第一章第一天
前言收获
并行和并发的区别
- 并发:面对多个任务同时存在的情况下,能够处理它,不用管如何执行(可以交替执行、可以并行执行)
- 并行:面对多个任务同时存在的情况下,能够处理它,任务和任务间互不影响,一起执行
并行概念是并发概念的一个子集,如下图所示

并行架构:
- 位级并行
- 指令级并行
- 数据集并行
- 任务级并行
全书要讲解的7个模型:
- 线程与锁:其他模型的技术基础,虽然存在不足但仍是众多软件的首选
- 函数式编程:消除了可变状态,根本上是线程安全的,易于并行执行
- Clojure之道——分离标识与状态:命令式编程和函数式编程混搭的方案,在两种编程方式中取得平衡来发挥两者的优势
- actor: 适用于共享内存模型和分布式内存模型,也适合解决地理分布型问题,能够提供强大的容错
- 通信顺序进程(Communicating Sequential Processes ,CSP): 该模型和actor很类似,两者都基于消息传递。不过CSP侧重于传递信息的通道,而actor模型侧重于通道两端的实体,使用CSP模型的代码会有明显不同的风格
- 数据级并行:GPU,如果要进行有限元分析、流体力学计算或其他的大量数字计算,GPU的性能将是不二选择
- Lambda: 综合了MapReduce和流式处理的特点,是一种可以处理多种大数据问题的架构
后续学习要带上以下几个问题:
- 这个模型适用于解决并发问题、并行问题还是两者皆可?
- 这个模型适合哪种并行架构
- 这个模型是否有利于我们写出容错性强的代码,或用于解决分布式问题的代码?
互斥和内存模型
因为该部分讲的不深,而且经过两本并发书籍的洗礼,理解起来较为简单,就将总结的话记一下:
- 对共享变量的所有访问都需要被同步化
- 读线程和写线程都需要同步化
- 按照约定的全局顺序来获取多吧锁
- 当持有锁时不要访问外星方法(不了解的方法,里面可能会对部分资源加锁)
- 持有锁的时间尽可能短
自学篇之JMM
自学篇之JSR-133的FAQ
原文出自(http://www.cs.umd.edu/~pugh/java/memoryModel/jsr-133-faq.html)
究竟什么是内存模型?
在现代处理器系统里,通常会划分几个内存缓冲层。它们能够提高访问数据的速度并且降低共享内存总线的流量(因为缓存层就直接可以满足处理器需求),它们的结构示意图如下所示。那么两个处理器在同一时间查看同个内存地址时,什么情况下能看到一样的值。这就是内存可见性问题

第一个影响可见性的原因是,强内存模型能直接保证 对同一个内存地址在任何时候都能看到相同的值;弱内存模型需要 内存屏障(memory barriers),这些指令会要求处理器刷新或无效化本地缓冲区,所以就能看到其他处理器的写入。因为强内存模型对内存指令的需求较少(注意,不是不需要,只是需求少),所以强内存模型易于编程。然而近代处理器都是鼓励往弱内存模型发展,由于弱内存模型对缓存一致性比较放松,跨多处理器和大量内存会有更好的扩展性。
第二个影响可见性的原因就是重排序,在内存模型给定的边界里任由编译器、内存、处理器优化。
所以Java内存模型主要描述了程序中的变量和物理机中内存、寄存器间的关系,JMM尽可能让编译器、硬件可以执行优化。
其他语言有内存模型吗
很多编程语言,像C、C++,就没有直接支持多线程。如果想避免所有重排序发生在编译器里,整个架构都需要依赖线程库、依赖编译器、系统
JSR-133讲了什么
JSR-133 为Java定义了一个新的内存模型,修复了早期的内存模型问题。为了实现它,final、volatile的语义均得到改变。通过完整的JSR-133语义可以了解到JSR-133的全貌
JSR-133的目的包含以下几点:
- 保持已存在的安全保证,加强其他安全,比如变量值不能凭空出现,每个变量值的出现都应该有理有据
- 正确同步的程序语义应该尽可能简单、直观
- 对于不正确同步的程序语义,应尽可能的减小风险。
- 对于每个程序员来说,都应该能正确推导多线程和内存间的交互关系
- JVM应该被设计为:能为大部分主流的硬件架构提供高性能
- 应该保证初始化安全。如果一个对象被正确的构造(没有发生this逸出),就算没有同步,所有引用该对象的线程都将看到该构造器设置的final变量的值。
- 对现有代码造成最小的影响
重排序意味着什么
当访问某个变量时,可能出现它的值和预期指定的值不一样。编译器会重排序指令,处理器也可能会重排序指令。数据在寄存器、缓冲、内存间移动的顺序不按程序指定的来。
尽管如此,单线程程序是看不到重排序的影响的,即中途发生重排序,结果仍然不会改变。然而重排序会在多线程中起到作用:由于一个线程的修改可以被另外一个线程观察到,所以重排序中途修改的值会被另一个线程观测到。
旧的内存模型有什么问题
难理解,出现范围广。具体表现在以下两个例子里:
- final变量被一个线程读时可能出现默认值,另一个线程读时可能出现构造值。这就意味着不可变对象发生变化了。
- volatile写会和普通读/写发生重排序。
什么是不正确的同步
- 一个线程对一个变量执行写入
- 另一个线程对同一个变量执行读取
- 写入和读取没有用同步排序
当发生这种情况时,都可以认为是发生了“数据竞争”
同步做了什么
- 排斥:一个线程获取了管程,另一个线程只能等到第一个线程释放后才能获取
- 可见性:在我们释放管程时,同步块会将本地内存刷新到主内存;获取管程之后,同步块会使本地缓存失效,重新去主内存中加载。
- happens-before:当一个操作happens-before另一个操作,那么就能向程序员保证JMM会让第一个先于第二个发生并对第二个可见
处理器(一)
术语科普
- 机器数:在计算机里表示的方法,即正负不再是用
-,+来表示,而是采用0表示正数,1表示负数 - 真数:相对机器数,用
-,+来表示正负的数就叫真数
原码
原码即最原始的二进制表示法,这种方法简单直观。
比如 +11,通常表示为 0000 1011
比如 -11,通常表示为 1000 1011
不知道小伙伴会不会有疑问,那8位可以表示的范围不久小了吗?
答:是的,小了一半。而且 [+0]原 != [-0]原
定义
整数
计算机规定,任何正数的原码都是其本身。而对于负数来说,需要把最高位变为“1”,所以需要 2n - x,由于负负得正,其实是 2n + |x|,其示意图如下所示
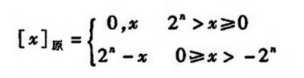
其中x为真值,n为整数的位数
比如:
当x = -1011 时,[x]原 = 24(即1 0000) - (-1011) = 1 1011,即1, 1011
24是指16,16即10000,如果是23,那么就是8,即1000
注意,这里记得用逗号分隔 符号位和数值位
小数
正的小数都是其本身。而对于负数来说,需要把最高位变成“1”,所以需要1 - x,由于负负得正,其实是 1 + |x|,其示意图如下所示
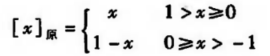
其中x为真值,n为整数的位数
比如:
当x = -0.1011 时,[x]原 = 1 - (-0.1011) = 1.1011
注意,这里记得用点号分隔 符号位和数值位
优点
简单直观
缺点
进行加减运算会带来许多麻烦,比如一个正数和负数相加(注意,这里进行运算时都要采用机器数,不能使用真数)
补码
由于原码在进行四则运算时,总需要判断正负号,所以科学家想到了一种用正数代替负数的方法,即补码
补码的原理类似于 mod(即取余)。比如有一个时钟,现在指向6点,如果想拨到8点钟,我们可以顺时针拨2个小时(可以理解为(6 + 2) mod 12 = 8),也可以逆时针拨10个小时(可以理解为 (12 + (6 - 10)) mod 12 = 8)。这说明了可以用加法代替减法,只要限定最大值,然后不断循环即可。
##定义
整数
计算机规定,正数的补码是其本身;负数的补码要取模 + 真值(为负数)。

其中x为真值,n为整数的位数
比如:
当 x = -1010 时,[x]补 = 24 + (-1010) = 10000 + (-1010) = 0110
小数
计算机规定,正数的补码是其本身;负数的补码要取2 + 真值(为负数)。

比如:
当 x = -0.1010 时,[x]补 = 2 + (-0.1010) = 10.0000 + (-0.1010) = 1.0110
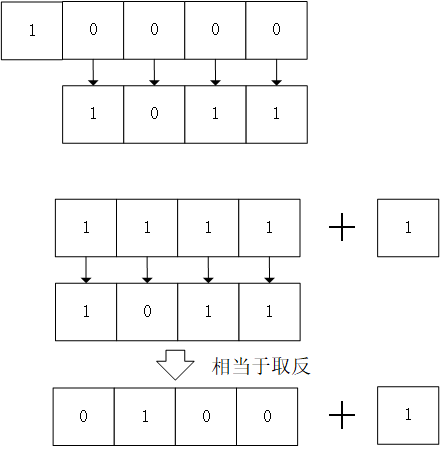
对于补码来说,由于经常会出现进位的算法,计算时很麻烦,所以这里给出一个简单的算法:
优化
除原码符号位,将其他数值为取反(相当于减),最后加一即可。
反码
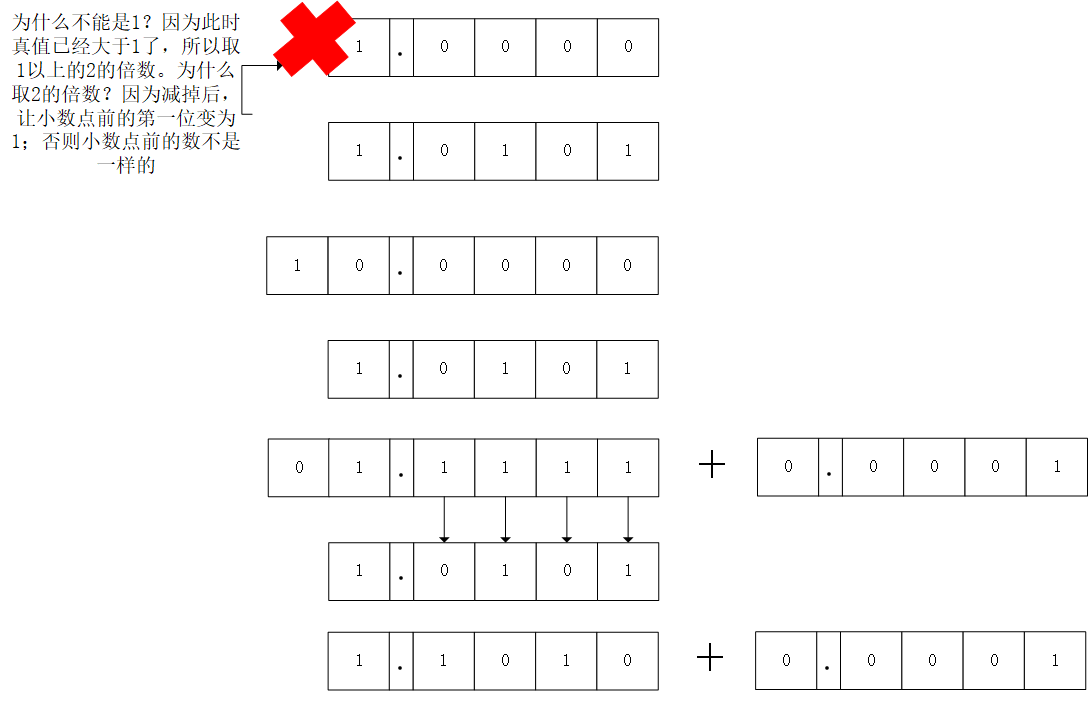
反码其实是补码的一个过渡表示法。将除符号位以外的数值位取反,就可以得到反码(这是我们最直观的做法,但是计算机没那么聪明,需要通过数学公式得到)。

可以很明显发现反码其实就是在补码的基础上减去了一个“1”,就得到了反码。

2-n 代表前面有n个0,比如 2 -4,即为0.0001
同理,也是在求补码的基础上减去了一个“1”(这里的“1”对于小数来说是最小的n位)
移码
待我学习一波定点和浮点。
DMA方式
概述
DMA方式是IO接口的控制方式之一。DMA和其他控制方式相比,它拥有专门的数据通路,所 以主存和设备交换信息时,可以不经过CPU,也不需要CPU参与数据交换(程序中断需要CPU参与中断服务),那么就省去了 保护现场、恢复现场的流程。
由于DMA接口的速度很快,所以经常用于高速IO设备,因为高速IO设备如果不及时交互信息,很可能产生数据丢失。
上面所有的优势均建立在 主存和IO设备直接交换信息,不需要经过CPU这个条件之上,而当CPU和IO设备同时访问主存时,就会发生冲突。为了解决冲突,通常会采用以下几个方法:
- 停止CPU访存
- 周期挪用(又称周期窃取)
- 交替访问
停止CPU访存
假设IO设备要发送一些数据,DMA接口会向CPU发出一个停止信号,要求CPU放弃总线控制前,DMA接口获得总线控制权后,开始进行数据传送,在数据传输结束后,DMA接口通知CPU可以使用主存,并把总线使用权交给CPU。其时序图如下所示
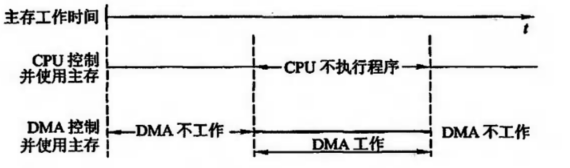
这种方式的缺陷主要在于 CPU失去总线控制权的这段时间里,DMA接口也并不是百分百利用这段时间,因为IO设备传输数据给接口的数据缓冲器这段时间也总大于一个存期周期。换句话来说,当IO设备还在准备数据的时候,CPU也仍然处于空闲状态。
周期挪用(周期窃取)
当IO设备发出DMA请求时,IO设备便挪用或窃取总线占用权一个或几个周期,而DMA不请求时,CPU仍可继续访问。
而IO设备请求DMA时,会有三种状况:
- CPU不访问主存,那么DMA接口和CPU不会发生主存
- CPU正在访问主存,那么DMA接口需要等待该次存储周期结束
- DMA和CPU同时要访问主存时,DMA接口发出请求占用几个存取周期(即在CPU执行访存指令过程中插入DMA请求,使CPU延迟了几个周期再访问)
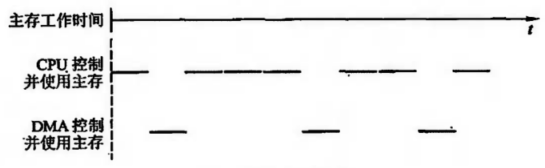
IO设备每挪用一个主存周期都要申请总线控制权、建立总线控制权和归还总线控制权。因此,对于主存来说,虽然只传一个字只占用一个周期,但对DMA接口来说,要处理包括申请、建立、传输、归还等阶段,实质上DMA接口要占好几个周期。
因此周期挪用适合IO设备的读/写周期大于主存周期的情况。
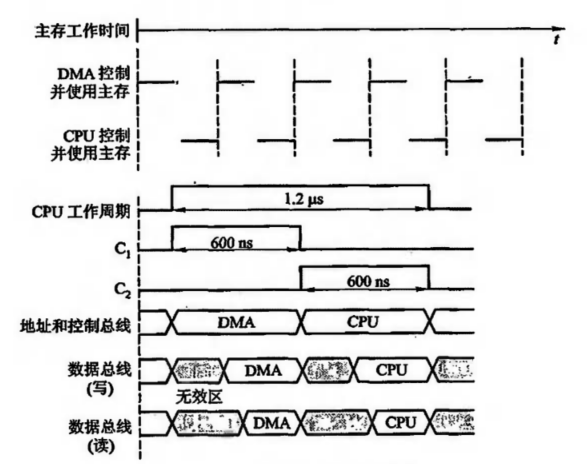
DMA与CPU交替执行
这种方式不需要总线使用权的申请、建立、归还过程,总线使用权分别由C1、C2控制的。CPU和DMA接口各自有独立的访存地址寄存器、数据寄存器、读写信号。实际上总线变成了C1、C2控制下的多路转换器,其总线控制权的转移几乎不需要时间,具有很高的DMA传送速率。
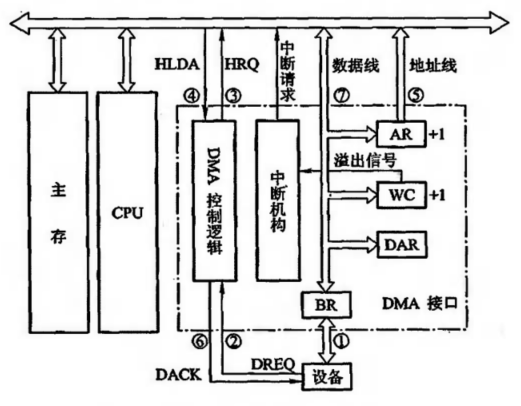
DMA接口的功能和组成
DMA接口应该具有以下几个功能:
- 向CPU申请DMA传送
- 在CPU允许DMA工作时,处理总线控制权的转交,避免引起总线竞争
- 在DMA期间管理系统总线,控制数据传输
- 确定数据传送的起始地址和数据长度,更新数据传输过程中的数据地址和数据长度
- 在数据块传输结束时,给出DMA操作完成的信号
DMA接口的组成原理如下图所示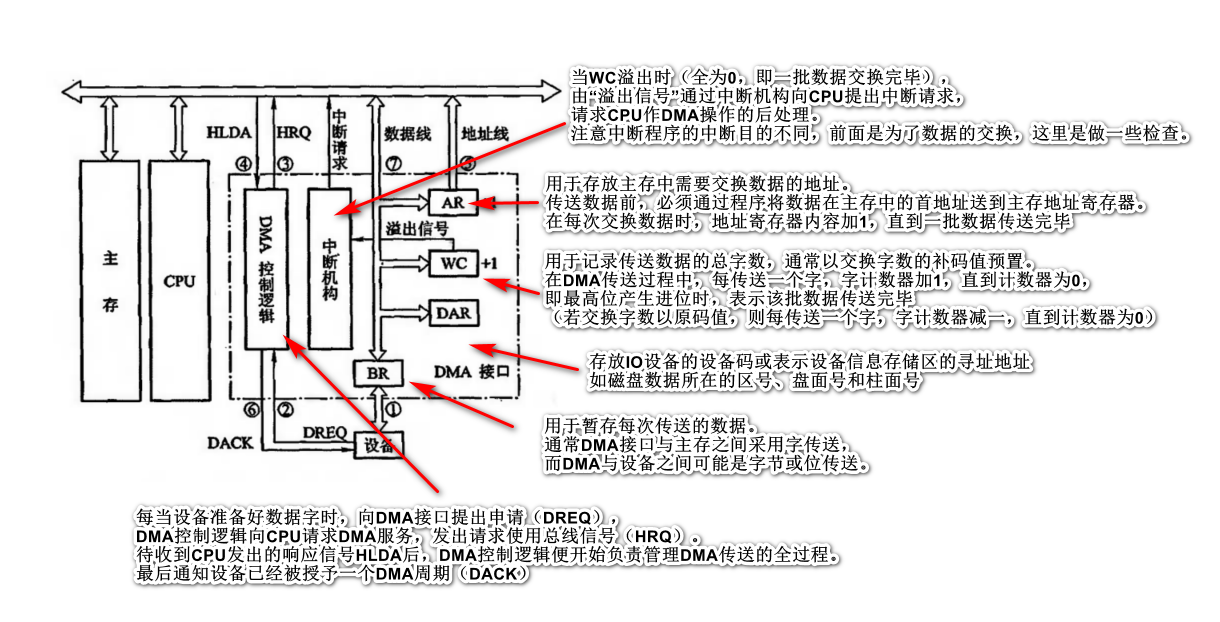
DMA数据传输的流程
DMA的数据传送过程分为 预处理、数据传送、后处理三个阶段。
其示意图如下所示: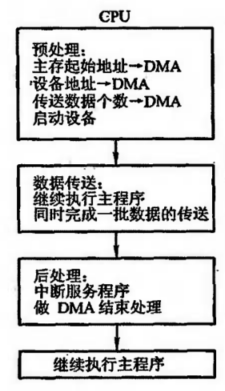
预处理
在DMA接口开始工作之前,CPU必须给它预置如下信息:
- 给DMA控制逻辑指明数据传送方向
- 给设备地址寄存器(DAR)送入设备信号
- 向主存地址寄存器(AR)送入交换数据的起始地址
- 对字计数器赋予交换数据的个数
当这些工作完成后,程序初始化结束。
数据传输
等IO设备准备好数据 或 处理完输出的数据后,就让DMA接口向CPU提出总线获取控制权,如果有多个DMA请求,则按轻重缓急排队等待。当IO设备获取到总线控制权后,数据的传输就由DMA进行管理。
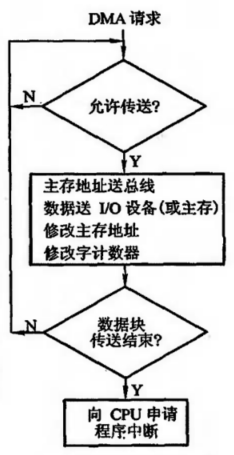
数据读取过程:
- IO设备发送数据到数据缓冲区内
- IO设备发送DREQ请求给DMA控制逻辑
- DMA控制逻辑发送HRQ给总线申请获取总线控制权
- 获取成功后,DMA控制逻辑收到HLDA响应,将总线控制权交给DMA接口
- 将DMA主存地址寄存器的主存地址送到地址总线,并命令存储器写
- 通知设备已被授予一个DMA周期(DACK),并为下一个字做准备
- 将DMA数据缓存寄存器的内容送至数据总线
- 主存将数据总线上的信息写到地址总线指定的存储单元
- 修改AR和WC
- 判断数据块是否结束,若未结束继续传输;否则向CPU申请程序中断,标志数据传输完毕
输出数据过程:
- 当DMA的BR已将数据送至IO设备后,表示BR已空
- 设备向DMA接口发请求DREQ
- DMA接口向CPU申请总线控制权HRQ
- CPU发回HLDA信号,允许交出总线控制权
- 将DMA主存地址寄存器中的主存地址送到地址总线,并命令存储器读
- 通知设备已经被授予一个DMA周期(DACK),并为交换下一个字做准备
- 主存将相应地址单元的内容通过数据总线读入DMA的BR中
- 将BR的内容送到输出设备
- 修改AR和WC
- 判断数据块是否结束,若未结束继续传输;否则向CPU申请程序中断,标志数据传输完毕
后处理
当DMA的中断请求得到响应后,CPU停止原程序的执行,转去执行中断服务程序,做一些DMA的结束工作,包括校验数据的正确性、决定是否继续用DMA传送其他数据块、测试传输过程中是否发生错误。
程序中断方式
概述
计算机在执行程序得过程中,当出现异常情况或特殊请求时,计算机停止现行程序((正在运行的程序)),转向对这些异常情况或特殊请求得处理,处理后再返回到现行程序的间断处。
由于CPU和IO设备速度的不匹配,CPU通常要等待一段时间,才能实现主机与IO设备之间的信息交换。所以当CPU启动了IO设备之后,就转去执行现行程序,让IO设备准备好后主动通知(中断)CPU,CPU转去执行中断程序,进行数据交换。这就是IO中断。

中断方式的电路
中断请求触发器和中断屏蔽触发器
每台外部设备都必须配置一个中断请求触发器INTR,当其为“1”时,表示该设备向CPU提出中断请求。同时也需要一个配对的 中断屏蔽器,用于屏蔽一些低优先级的中断请求(面对多个中断请求时),当它为“1”时,表示封锁其中断源。其电路逻辑图如下所示
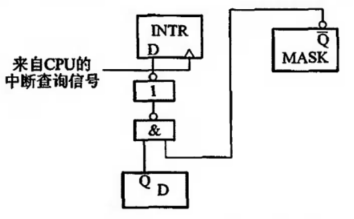
当设备准备就绪D为“1”、且该设备MASK不为“0”时,由CPU在指令执行结束阶段时,由CPU发出中断查询信号,将INTR设置为“1”
排队器
当多个中断源同时向CPU发出请求时,CPU会根据中断源的不同性质对其排队,给予不同等级的优先权,并按优先级等级给予响应。
通常来说速度越快的IO设备,优先级越高,因为不及时响应高速的IO请求,信息可能会发生丢失。
排队器分为硬件排队器和软件排队器:这里只介绍硬件排队器,下图是硬件排队器的电路
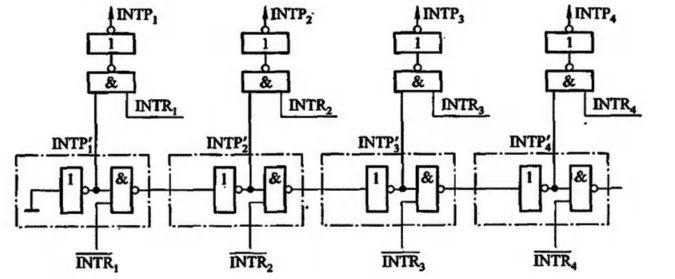
当各个中断源无请求时,各个INTR-均为高电平。一旦某个中断源提出中断请求时,就会让优先级低的中断源变为低电平,封锁其中的中断请求。比如当2、3号中断源同时有请求时(INTR2-、INTR3-均为0),流程如图所示
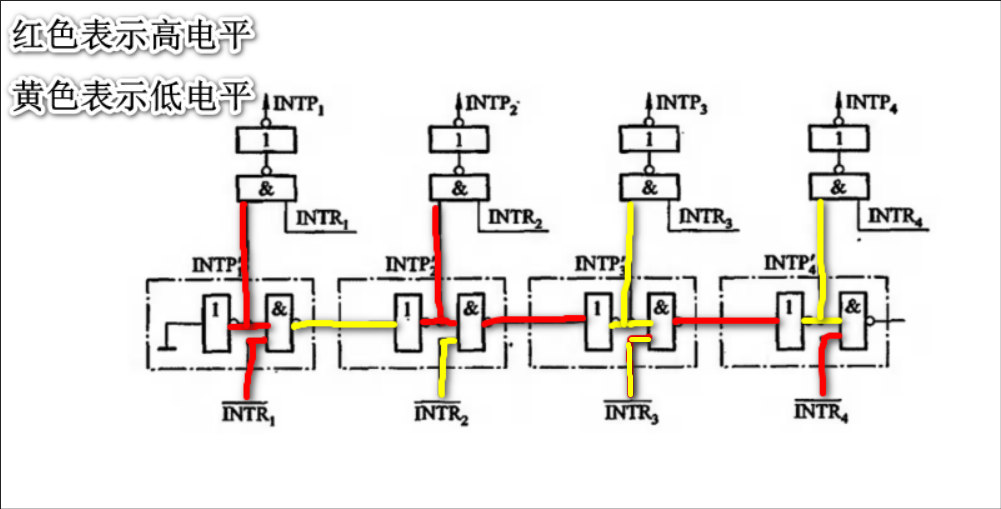
INTRi- 没有提出请求时均为高电平,根据例子,二、三号中断源提出请求,二、三号输入低电压,由于二号经过与非门输出高电压,经过三号的非门,输出低电压,让三号无法被选。此时因为INTP1‘和INTP2‘输出都为高电压,又通过INTPi来和输出信号进行与运算,最终输出INTP2
中断向量地址形成部件(设备编址器)
CPU一旦响应了IO中断,就要暂停现行程序,转去执行该设备的中断服务程序。不同的设备有不同的中断服务程序,每个服务程序都有一个入口,而CPU需要通过设备编址码找到中断服务程序实际所在的位置。
设备编址码的输入是来自排队器的输出INTPi,它的输出是中断源的位置
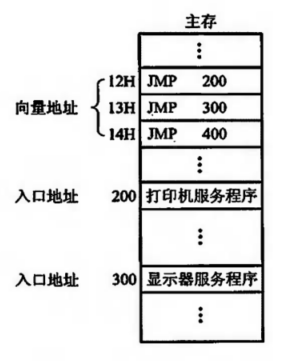
比如编址器输出12H,CPU就能从主存的12H的位置查找(假设是统一编址),找到对应的中断服务程序的入口地址
IO中断处理过程
中断的条件和时间
- CPU中的EINT(允许中断触发器)为“1”,该触发器用开中断置位,用关中断使其复位
- CPU响应中断的时间一定是在每条指令执行阶段的结束时刻
接下来以输入设备为例,结合流程示意图进行讲解,流程图如下所示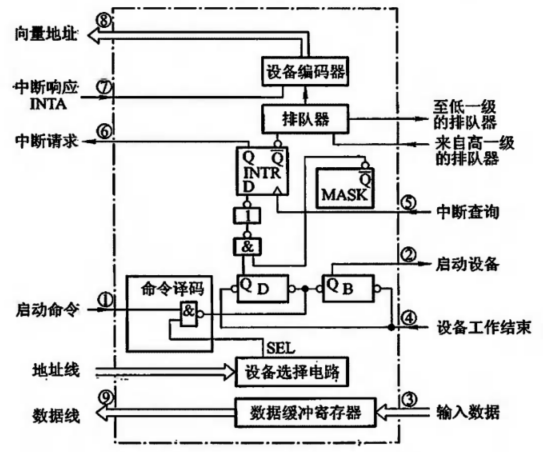
当选中设备后,设备选择电路发出SEL信号
- CPU发出启动命令,将触发器B置为“1”,D为“0”
- 接口启动输入设备,设备开始工作
- IO设备将数据送入数据缓冲寄存器
- 当输入设备发出设备工作结束信号后,D被置为“1”,B被置为“0”,标志设备准备就绪
- 当设备准备就绪,且本设备未被屏蔽时,在指令执行结束阶段,CPU会发出中断查询信号
- 设备中断请请求触发器INTR被置为“1”,向CPU提出中断请求,INTR送至排队器,进行中断判优
- 若CPU允许中断(ENIT=1),设备又被排队选中,即进入中断响应阶段,由中断响应信号INTA将排队器输出送至编码器形成的向量地址
- 向量地址送至CPU,作为下一条指令的地址
- 向量地址里存放的是无条件转移指令(看中断流程图),待转移指令执行完毕,就转去对应设备的服务程序入口地址,开始执行中断服务程序,通过输入指令将数据缓冲寄存器的输入数据送至CPU的通用寄存器,再存入主存相关单元
- 中断服务程序的最后一条指令是中断返回指令,当其执行结束时,中断返回至原程序的断点处。
中断服务程序的流程
总共分为四个阶段
- 保护现场
- 中断服务
- 恢复现场
- 中断返回
保护现场
其一是保存程序的断点,其二是保存通用寄存器和状态寄存器的内容。前者涉及到中断隐指令,后者由中断服务程序完成。中断服务程序会在程序的起始部分安排若干条存数指令,将寄存器的内容存至存储器中保存;或者用进栈指令将各个寄存器的内容压入堆栈中保存。
中断服务
不同的设备中断服务不一样,比如打印机要求CPU将需要打印的字符代码送入打印机的缓冲器内;显示器设备要求CPU将需要显示的字符代码送入显示存储器中
恢复现场
在中断服务程序退出前,将中断的现行程序恢复回来。通常可用取数指令或出栈指令,将保存在存储器中的信息送回到原来的寄存器中
中断返回
中断服务程序的最后一条指令通常是一条中断返回指令,使其返回到原程序的断点处
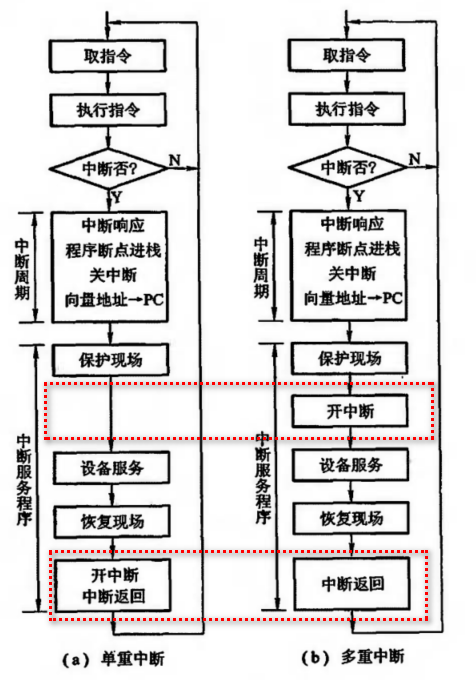
单重中断和多重中断
当CPU响应了一个中断源的中断请求后,EINT会被置为“0”,无法让其他中断源继续请求。对于单重中断,在保护完现场后,即刻去执行设备服务,直到恢复完现场后,才将EINT置为“1”并返回。而对于多重中断来说,在保护完现场后,就立刻将EINT设置为“1”,允许其他中断源插入中断请求。示意图如下所示
多重中断就和方法里面再调用其他方法一样,如下图所示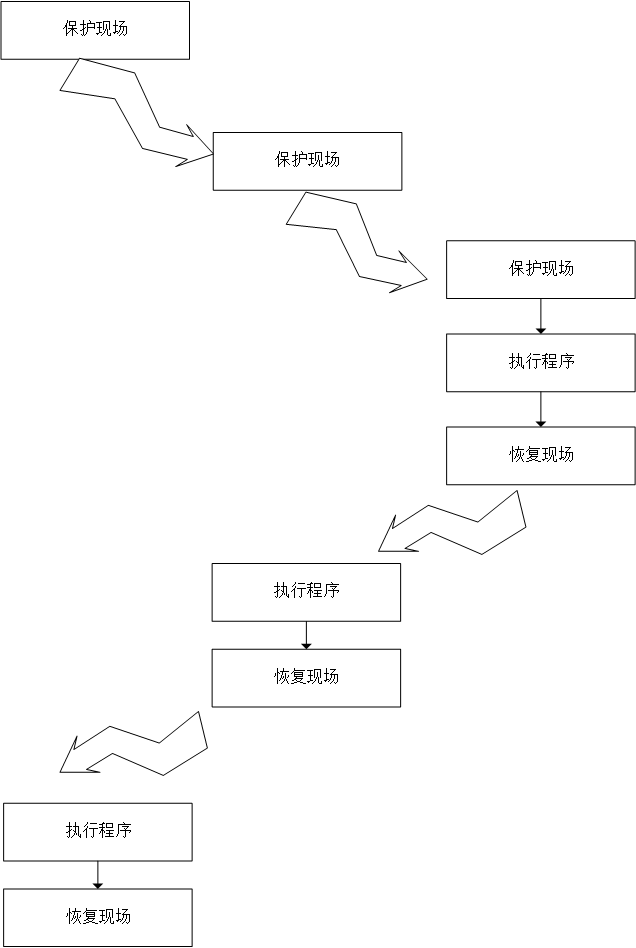
总结
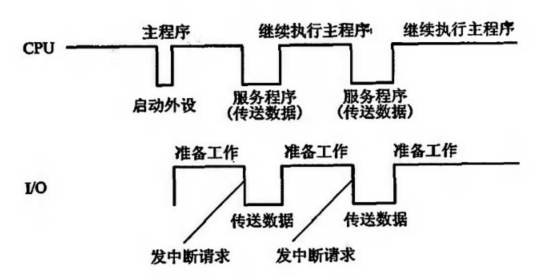
从宏观上看,中断方式克服了程序查询方式的原地踏步,CPU和IO设备是并行操作的,提高了CPU的资源利用率
从微观上看,CPU在处理中断服务程序时仍然需要暂停原程序的运行,尤其是当高速IO或辅助存储器频繁地与主存交换信息时,需要不断打断CPU执行主程序而执行中断服务程序。
为了完善中断程序,人们提出了DMA控制方式。


输入输出系统之概述
I/O设备的发展
第一阶段
早期计算机采用 分散连接(指计算机各个部件间相连的方式) 的结构,如下图所示。每一个部件之间都需要连接。

以下是分散连接的抽象图

缺点:
- 由于一个I/O设备需要一个专用的逻辑控制电路才能连接使用,所以线路会很多很繁琐。
- 该结构下对I/O设备的读写基本都是串行的,会严重影响CPU的运行速度
- 由于I/O设备和CPU之间的耦合性过于紧密,所以对于设备的增减过于麻烦
第二阶段
这个阶段计算机采用 总线连接的结构,(这里关注点在于I/O设备,所以拿单总线结构距离)。如下图所示

这个阶段I/O设备通过 接口 挂在在总线上与CPU相连。I/O接口通常包含 数据通路、 控制通路 两个部分:
- 数据通路:用于缓冲数据,可以进行串-并转换,匹配I/O设备和CPU的速度。
- 控制通路:用于接收I/O指令
这个阶段相比第一阶段,补足了缺点,并让CPU和I/O设备并发处理的时间更多,但是还不能做到完全的并发处理
第三阶段
这个阶段更适用于I/O设备数量繁多的大型计算机,即在CPU和I/O接口之间又加入了 通道,通道用于负责管理整个I/O过程。当通道接收到CPU的指令后,先从主存中取出通道程序,然后单独执行,直至I/O设备输入或输出完毕,再通知CPU完成。这个过程不需要CPU参与,就大大提高了CPU和I/O设备的并行能力。
第四阶段
采用I/O处理机,I/O处理机又称 外围处理机,其相当于一个小型CPU,基本是独立于CPU进行工作的
输入输出系统的组成
输入输出系统主要包含两个部分:I/O软件、I/O硬件
I/O软件
I/O指令
I/O指令时CPU指令集的一部分,如下图所示
- 操作码:标明该指令是 I/O指令还是其他指令
- 命令码: 标明该指令具体做什么事,比如从I/O设备取出数据到CPU里、或者将数据送到I/O设备里
- 设备码:标明要处理的目标对象
通道指令
通道指令不是CPU指令集的一部分,通道指令是为拥有通道的I/O系统专门设置的指令,这类指令结构通常如下图所示

该指令通常存放再主存中,当需要运行时,由通道从主存中取出并执行。通道程序即由通道指令组成,它完成了某种外围设备与主存之间传送信息的操作。
区别
通道是通道自身的指令,用来执行I/O操作;
I/O指令是CPU指令系统的一部分,是CPU用来控制输入输出的操作命令。
在有通道结构的计算机中,I/O指令不实现I/O数据传输,主要是用于启动、暂停I/O设备;或者查询通道和I/O设备的状态及控制通道所做的其他操作。
一旦CPU启动了I/O设备后,就由通道接管CPU对I/O设备的管理。
I/O硬件
通常包括接口模块和I/O设备两大部分
I/O设备与主机的联系方式
这个部分主要解决三个部分:
- 设备地址
- 设备选择
- 传送方式
- CPU和设备间的传输方式
设备地址
统一编址:
将主存划分一部分地址出来作为设备地址,比如在64K地址的存储空间中,划出8K地址作为I/O设备的地址,只要访问的地址在这8K范围内,就是对I/O设备的访问。单独编址
单独设置一个存储空间作为I/O设备的地址,使用专用的指令来存储。
设备选择
用设备选择电路识别是否被选中
传送方式
- 串行
- 并行
联络方式
立即响应
信号一到,立即响应
异步工作 + 应答信号

- 在读过程中,I/O接口发送
READY信号 给 I/O设备 - I/O设备收到信号后,从I/O接口中取出数据,并回应一个
Strobe信号给I/O接口

- 在写过程中,I/O设备发送数据到I/O接口中,并发送信号
Strobe - I/O接口收到信号后,通知CPU中断处理,然后返回
READY信号给I/O设备
同步工作采用同步时钟
I/O设备的控制方式
程序查询控制

该方式主要在于CPU读I/O设备状态,然后检查状态是否就绪,如果没有就绪就循环查询。该查询方式会消耗很多时间在状态检查上(一直检查),同时还会花费部分时间在数据交互上。
程序中断控制

当CPU执行原程序时,如果遇到了I/O指令启动了I/O设备后,等待I/O接口数据缓冲区满了后,再通知CPU中断,执行中断服务程序

这个控制方式相比中断方式,CPU不需要长时间轮询状态,只需要启动I/O设备后,就能转头去做其他事情。直到I/O设备发回中断请求,CPU停止做事情,转去执行中断服务程序(交换信息)。
DMA控制
由于程序中断在数据交换过程仍然要CPU参与,会在一定程度上影响CPU速度。
DMA控制主要通过以下三个手段实现:
- 主存和I/O之间架一条通路
- 不中断现行程序
- 周期挪用
IO接口
接口可以是两个部件之间连接的电路,IO接口通常是指CPU和IO设备间的硬件电路和控制软件,而不同的IO设备通常都通过IO接口和CPU取得联系的。
IO接口的功能有如下几个:
- 实现IO设备的选择
- 匹配IO设备和CPU的速度
- 实现数据的串-并转换
- 实现电平的转换
- 发送控制信号
- 保存状态信息,供CPU进行查询
这里举个四功能的接口,看看它的功能和组成

组成介绍
设备选择线:
该线是用于传输设备码的,它的根数取决于I/O指令设备码的位数。
命令线:
该线是单项的,通常由CPU发出,用于传输CPU的I/O指令
状态线:
反馈IO设备的状态,该线也是单项的,通常
数据线:
双向的,用于传输数据,其根数一般等于存储字长的长度
功能介绍
选址功能
IO总线与所有设备的接口相连,但CPU究竟选择哪台设备,还得通过设备选择线上的设备码来确定。
每个接口会带有选址功能,当设备线上的设备码与I/O设备的设备码一致时,应发出设备选中信号SEL。

传送命令功能
当CPU向IO设备发出命令时,要求IO设备能做出响应。如果设备不具备传送命令的信息功能,设备将无法响应。所以通常在IO接口中设有存放命令的寄存器以及命令译码器。
命令寄存器用来存放IO指令中的指令码,只有当设备选择电路有效,SEL信号有效,才能存放命令道寄存器中。

传送数据的功能
IO设备和CPU之间通过接口的数据通路进行数据交互,接口还会有数据缓冲的功能,它用来暂存IO设备和CPU间要交换的数据。数据通路的位数取决于设备的种类。
IO设备工作状态
为了使CPU能时刻了解IO设备的运行状况,接口通常会设置一些反映设备状态的触发器。
比如工作触发器B、完成触发器D、中断触发器INTR,屏蔽触发器MASK
- D = 0, B = 0时,表示设备处于暂停
- D = 1, B = 0时,表示设备已准备就绪
- D = 0, B = 1时,表示设备处于准备状态

存储器之高速缓冲器(Cache)(下)
概要
CPU将主存地址 转换成 Cache地址时,需要经过 地址映射变换机构。不同层级的Cache 对 地址映射的算法方案 有不同的要求。
主存Cache地址映射变换机构
该机构主要是 将主存地址 按一定算法映射到 Cache地址
直接映射

映射算法
假设主存的块数为 m,Cache的块数为 c。那么通常会按 c个块为一组划分主存,每组的块编号依次按 0,1,2,...,c进行编号。假设m为16,c为2,其示意图如下所示

每组的编号(每组都从0开始计算),组0的块0、组1的块0(整体来看即块2)都对应着Cache的块0。也就是说,每组的第一个块 都必须存放在 Cache的第一个块里,同理 每组的第二块 都必须存放在 Cache第二个块里。示意图如下所示

用数学来表示映射算法即 z = i % c,i表示块编号,c表示cache的总块数(每组的块数)
比如:
- 3 % 2 = 1
- 2 % 2 = 0
映射流程
CPU发送来一个主存地址,该地址会分为三部分,一部分是主存组号,一部分是组内编号,一部分是块内地址,主存组号和组内编号共同组成块号。 如下图所示

- 当Cache收到CPU发送的主存地址时,提取组内编号
- 查找Cache中 组内编号指示 的块
- 将块中的标识提取出来(此处的标识保存着主存的组号)
- 比较Cache块提供的标识 和 主存提供的组号
- 如果组号一致,则进入下个判断;否则不命中
- 判断该块的有效位是否为“1”,如果为“1”,则命中;反之不命中
- 如果判断为不命中,Cache就从主存里取出新的字块,并替换旧字块,最后将该块的有效位置为“1”
总结
直接映射的缺点就是不够灵活,因为每个主存块都对应着唯一的Cache块,如果CPU频繁访问 不同组的同编号块,那么Cache就经常会发生替换,影响速度,空间利用率不高
全相联映射

映射算法
主存内每个字块都可以被存储到Cache的任意字块内。
映射流程
当CPU发出如下图所示的地址时,

- CPU通过主存块编号遍历Cache,查找Cache的标记是否和该主存编号相同
- 如果找到则命中,未找到则未命中
总结
全相联映射更加灵活,主存块可以保存到Cache的任意块中。Cache的利用率就会高,但是由于遍历,速度往往较低。
组相联映射

映射算法
主存划分为多个组,缓存也划分为多个组,每个组里的块编号都对应着缓存里的组编号。简而言之,原来的直接映射只能一个缓存块对应多个主存块,为了提高空间利用率,允许一个多个同组的缓存块对应多个主存块。示意图如下所示
每个组的第一个块都对应着缓存的第一个组。同理,每个组的第二块都对应着缓存的第二块。
映射流程
每个组的第一块 都能放到缓存的第一个组内的任意位置。一方面,主存的块可以放在对应组内的任意一个位置,体现出了全相联的思想;另一方面,主存的每个块都对应着唯一一个组,这是直接映射的思想。
该方案是直接映射和全相联映射的折中方案。
替换机构
替换就是指 Cache满了之后,如果要存放新的主存块,就需要将某个Cache块取出,并替换新的主存块进入
主存块就像是放在书架上的书,缓存块就像是放在床头的书,如果床头的书满了,就需要找个方案取出一本书,然后将想看的书加进去
替换机构就是做了 如何取书 这件事
目前有两种方案:
- 先进先出FIFO
- 近期最少使用(Least Recently Used)
LRU算法比较好的利用访存局部性原理,替换出近期用的最少的字块。通常是只记录每个快最近一次使用的时间。 - 随机法
取一个随机数,没有根据访存的局部性原理。
注意,这里讲到的访存局部性原理是指 只访问某个块的内容,而不是全部的内容,即局部性
存储器之高速缓冲器(Cache)(上篇)
概要
目前CPU遇到以下两个问题:
- 当 I/O设备向主存请求时,CPU无法访问主存,只能空等着
- 主存速度的提高 始终跟不上 CPU的发展
为了避免CPU和I/O设备争抢方寸,可在CPU与主存之间加一级Cache,此时CPU只需要跟Cache交互即可;另一方面,添加Cache还能解决主存与CPU速度的不匹配。
问题的提出
- 为什么添加一个Cache可以解决主存与CPU速度的不匹配问题?
- 既然Cache速度这么快,为什么不用 Cache 替换 主存?
- Cache的工作原理?
- 如何判断Cache的性能?
- Cache的性能由哪些方面决定?
- CPU、Cache、主存间是如何进行交互的?
为什么添加一个Cache可以解决主存与CPU速度的不匹配问题
因为经过数据分析,发现代码执行时是存在 局部性的。
局部性主要分成两部分:时间局部性、空间局部性。
- 时间局部性:CPU从主存取指令或取数据时,在一定时间内,可能会对同个块重复访问。
- 空间局部性:由于数据在主存内都是连续存放的,所以很可能下一个即将访问的指令也在同一个区域内。
根据以上两点,只要将CPU近期要用到的程序和数据提前存到Cache中,那么CPU在一定时间内,只需要访问Cache即可。
既然Cache速度这么快,为什么不用 Cache 替换 主存
因为Cache一般采用SRAM制作,其价格比主存昂贵。
Cache的工作原理
主存由2n个可编址的字组成,每个字有惟一的n位地址。
为了与Cache映射,将主存与缓存都分成若干 块,每个块内又包含多个 字,并使他们的块大小相同(即块内字数相同)。
这就将主存的地址分成了两端:主存块号、块内地址。主存块号的位数 + 块内地址的位数 = 一个字的位数。
除此之外,Cache中有一个“标记”。标记是用来表示当前存放的是 哪一块主存块。设置这个标记是因为 Cache块 远比 主存块 少,所以Cache里停留的内容不会是固定的,需要一个东西标志 某个缓存块对应的主存块。
不是主存地址可以通过转换获取缓存地址吗,为什么还需要标志位?因为Map需要的时间是最少的。

Cache的性能指标
判断Cache好坏的指标有三个:
- Cache的命中率
- Cache的平均访问时间
- Cache的访问效率
Cache的命中率
Cache命中率 = 命中数 / (命中数 + 未命中数)
当CPU欲访问主存中的某块数据时,Cache中正好存在,则称为 缓存命中
当CPU欲访问主存中的某块数据时,Cache中不存在,则称为 缓存不命中
平均访问时间
平均访问时间 = 命中时访问时间 * 命中率 + (1 - 命中率) * 未命中时间
平均访问时间 越接近 命中时访问时间越好
访问效率
在平均访问时间的基础上,扩充出访问效率,即访问效率 = 平均访问时间 / 命中时访问时间
Cache的性能由哪些方面决定
通常来说,Cache 由 块的数量、块的长度决定的。
Cache块的数量
因为Cache的块数量够多,达到主存的块数量,那么Cache除了第一次不命中,后面都是100%命中的。
Cache块的长度
Cache的块长则需要具体情况具体分析,因为Cache块过短,保存的数据量不够多,可以被命中的字少了,那么命中率就下降了;而Cache块过长,缓存中块数减少,可装入的块就少了,很容易出现新块 覆盖 旧块,然后因为新块被使用次数不够多,最终导致命中率下讲;另外块过长,可能会导致一些不相关的数据保存进来,白白浪费空间。
总结
一般来说Cache块通常取4~8个字或字节,也可以取 一个主存周期所能获得的主存信息长度。
CPU、Cache和主存间的交互

Cache存储体
Cache存储体以块为单位与主存交换信息,为了加速主存和Cache之间的调用速度,主存通常采用多体结构,且Cache访存的优先级最高。
主存Cache地址映射变换机构
该机构是将CPU送来的主存地址转换为Cache地址。由于主存和Cache的块内地址都是一样的长度,因此地址映射变换机构主要是将 主存块号 转换成 Cache块号。如果Cache命中,则CPU可以直接访问Cache存储体;如果Cache未命中,CPU会直接访问主存,不仅将该字从主存中取出,同时将它(代指字)所在的主存块一并存入Cache内。如果Cache不可装进,就得采用替换策略;反正,可以直接装入Cache。
替换机构
当Cache内容已满时,需要根据一定的替换算法将Cache内的某个块移除,从而装入新的主存块。
注意:Cache对用户是透明得,用户编程时用到的地址是主存地址,用户根本不知道这些主存是否已调入Cache内。因为将主存块调入Cache的任务全由机器硬件自动完成。
Cache的读写操作
Cache读
Cache读如下图所示
当CPU发出主存地址后,先判断该字是否在Cache中。若命中,直接访问Cache,并将该字送至CPU;若未命中,一方面要访问主存,将该字传送给CPU,与此同时,要将该字所在的主存块装入Cache。
Cache写分为 写通 和 回写两种方法

当CPU对某个Cache块内的数据进行修改时,也将对应的主存块的内容进行修改。

当CPU对某个Cache块内的数据进行修改后,该块被标记为 浊。当Cache发生替换时,将浊的块写回主存中去。
注意,上述的写操作都只针对于单核处理去,对于多核处理器,需要考虑Cache一致性问题
Cache的改进
改进方法有以下两种:
- 增加Cache级数
- 将统一的Cache变成分立的Cache
增加Cache级数
一开始CPU的Cache是直接集成在芯片内部的,这种Cache称为片内Cache(又或是L1 Cache)。片内Cache离CPU近,CPU也不需要占用系统总线就可以直接访问,速度极快。但是片内Cache没有相应数据块时,CPU被迫要访问主存内的信息,访问次数多了,速度相比直接访问Cache就慢下来很多。
所以为了解决CPU与主存间通讯占用总线的问题:在主存与片内缓存之间再加一级缓存,称为 片外缓存,片外缓存不使用系统总线而是 使用一个独立的数据路径。那么从片外缓存调入片内缓存的速度就得到了提高。
所以增加一个层次,即 片外Cache,该Cache置于L1与主存之间,当CPU要获取数据,先访问L1 Cache,如果L1 Cache没有,则访问L2 Cache。
将统一的Cache变成分立的Cache
统一缓存是将数据、指令都存放在同一缓存内;分立缓存是将指令和数据分别存放在指令Cache、数据Cache内。
两种方案如何选择是由 存储结构、指令控制方式两个方面决定的。
如果存储结构是统一的(指令和数据存储在同一主存内),则相应的Cache采用统一缓存;如果主存采用指令、数据分开存储的方案,则相应的Cache采用分立缓存
如果指令控制方式是超前控制或流水控制,一般采用分立缓存。
超前控制指在当前指令执行过程尚未结束时,就提前将下一条准备执行的指令取出,称为 超前取指 或 指令预取;流水线控制指多条指令同时执行,又可视为指令流水。